Abstract —
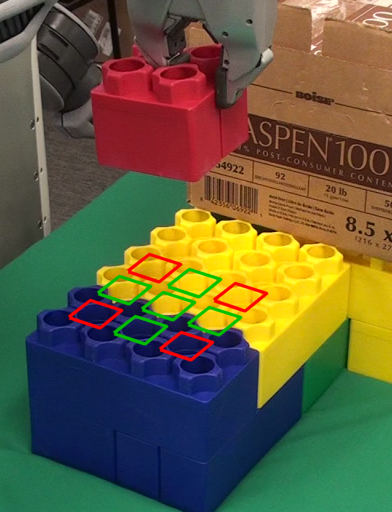
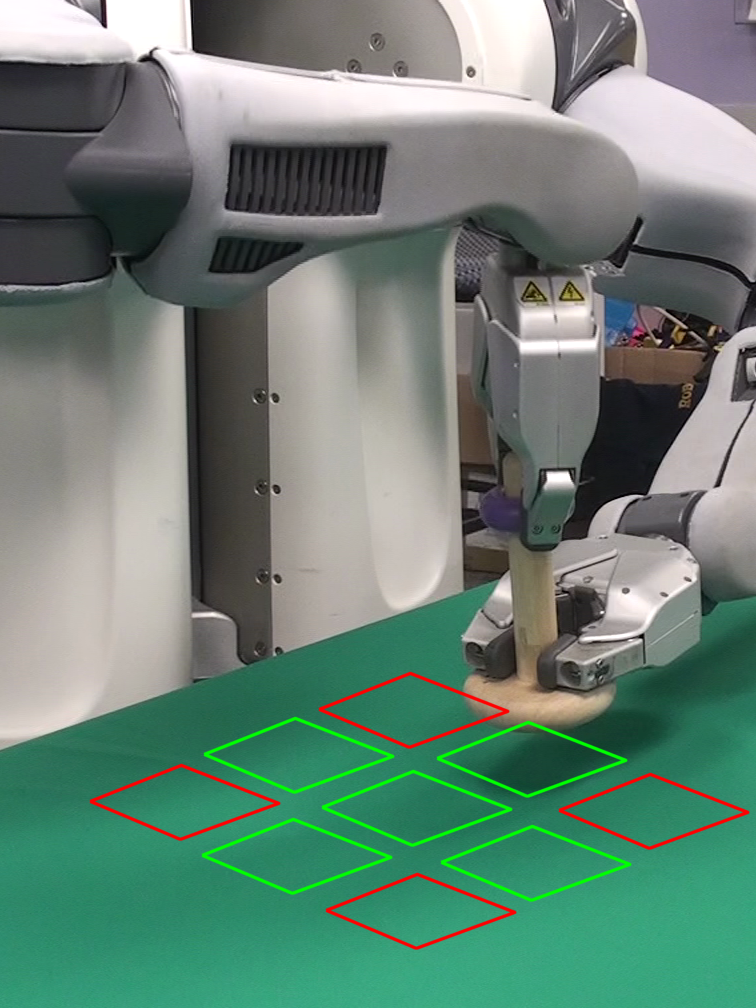
Autonomous learning of object manipulation skills can enable robots to acquire rich behavioral repertoires that scale to the variety of objects found in the real world. However, current motion skill learning methods typically restrict the behavior to a compact, low-dimensional representation, limiting its expressiveness and generality. In this paper, we extend a recently developed policy search method and use it to learn a range of dynamic manipulation behaviors with highly general policy representations, without using known models or example demonstrations. Our approach learns a set of trajectories for the desired motion skill by using iteratively refitted time-varying linear models, and then unifies these trajectories into a single control policy that can generalize to new situations. To enable this method to run on a real robot, we introduce several improvements that reduce the sample count and automate parameter selection. We show that our method can acquire fast, fluent behaviors after only minutes of interaction time, and can learn robust controllers for complex tasks, including stacking large lego blocks, putting together a plastic toy, placing wooden rings onto tight-fitting pegs, and screwing bottle caps onto bottles.
Paper: [PDF]