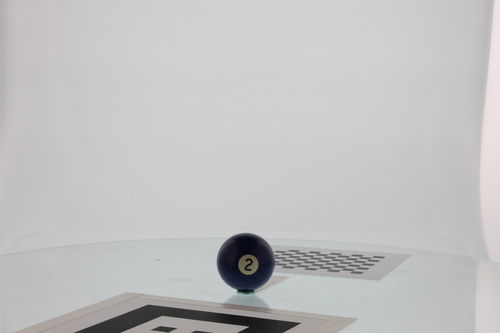
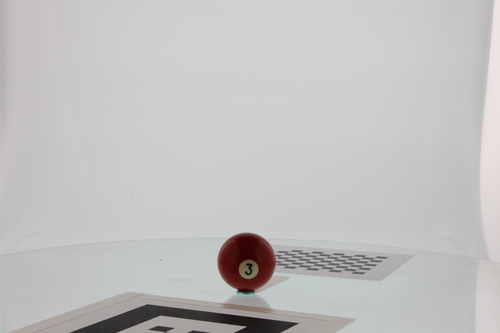
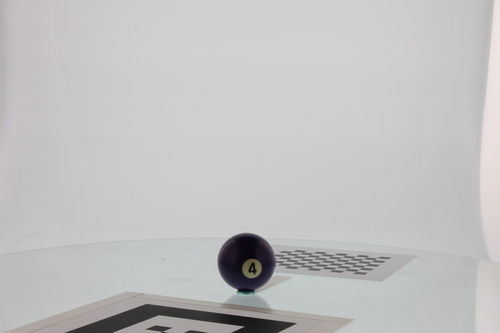
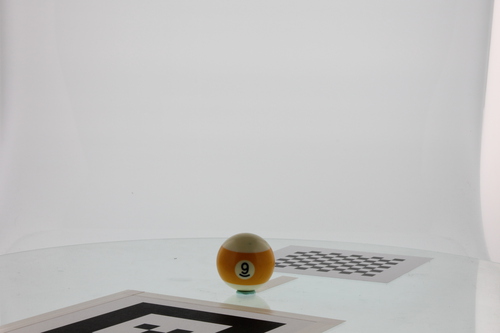
This is the website for the data described in the ICRA 2014 submission "A Large-Scale 3D Database of Object Instances." Specifically, for each of 100 objects, we provide:
- 600 12 megapixel images, sampling the viewing hemisphere
- 600 registered RGB-D point clouds from a Carmine 1.08 sensor
- Pose information for each of the above images and point clouds
- Segmentation masks for each of the above images (and segmented point clouds)
- Merged point clouds consisting of data from all 600 viewpoints
- A reconstructed mesh from the merged point cloud
Data is available via this Google Drive link.