Paper Description [pdf]
Computing grasps for an object is challenging when the object geometry is not known precisely. In this paper, we explore the use of Gaussian process implicit surfaces (GPISs) to represent shape uncertainty from RGBD point cloud observations of objects. We study the use of GPIS representations to select grasps on previously unknown objects, measuring grasp quality by the probability of force closure. Our main contribution is GP-GPIS-OPT, an algorithm for computing grasps for parallel-jaw grippers on 2D GPIS object representations. Specifically, our method optimizes an approximation to the probability of force closure subject to antipodal constraints on the parallel jaws using Sequential Convex Programming (SCP). We also introduce GPIS-Blur, a method for visualizing 2D GPIS models based on blending shape samples from a GPIS. We test the algorithm on a set of 8 planar objects with transparency, translucency, and specularity. Our experiments suggest that GP-GPIS-OPT computes grasps with higher probability of force closure than a planner that does not consider shape uncertainty on our test objects and may converge to a grasp plan up to 5.7x faster than using Monte-Carlo integration, a common method for grasp planning under shape uncertainty. Furthermore, initial experiments on the Willow Garage PR2 robot suggest that grasps selected with GP-GPIS-OPT are up to 90% more successful than those planned assuming a deterministic shape. The inital paper submission is available through the above pdf link and the final version of our paper is available through IEEE.
GPIS Grasping Dataset [zip]
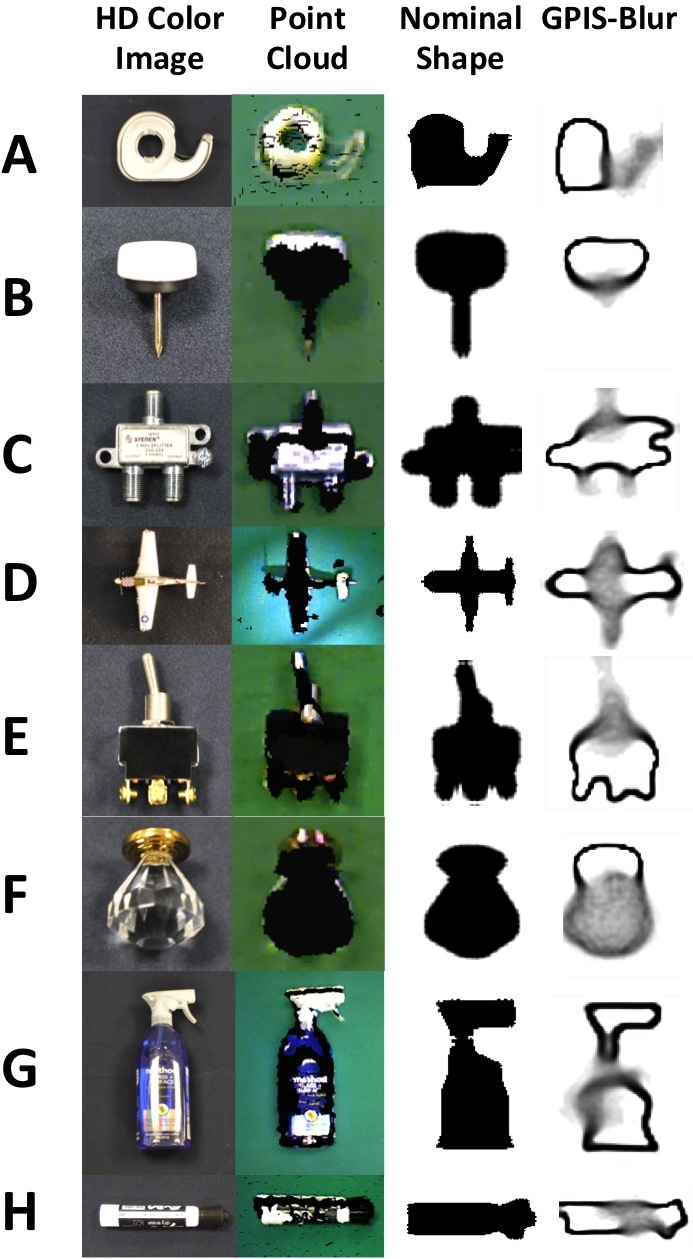
We have created a dataset of Gaussian process implicit surface representations (GPISs) of 8 objects for the purposes of studying the use of GPIS representations for shape uncertainty. The objects are difficult for robots to perceive due to (a) specularity, (b) transparency, (c) translucency.
Supplementary File [pdf]
Our supplmentary file describes additional equations for predicting GPIS normals, an analysis of our approximation to the probability of force closure, and additional experiments on convergence of our algorithm and time scaling with shape resolution.