|
|
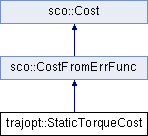
| StaticTorqueCost (RobotAndDOFPtr rad, const VarVector &vars, double coeff) |
| |
|
| CostFromErrFunc (VectorOfVectorPtr f, const VarVector &vars, const VectorXd &coeffs, PenaltyType pen_type, const string &name) |
| | supply error function, obtain derivative numerically
|
| |
|
| CostFromErrFunc (VectorOfVectorPtr f, MatrixOfVectorPtr dfdx, const VarVector &vars, const VectorXd &coeffs, PenaltyType pen_type, const string &name) |
| | supply error function and gradient
|
| |
|
double | value (const vector< double > &x) |
| | Evaluate at solution vector x.
|
| |
|
ConvexObjectivePtr | convex (const vector< double > &x, Model *model) |
| | Convexify at solution vector x.
|
| |
|
string | name () |
| |
|
void | setName (const string &name) |
| |
|
| Cost (const string &name) |
| |
|
|
RobotAndDOFPtr | m_rad |
| |
|
VarVector | m_vars |
| |
|
|
VectorOfVectorPtr | f_ |
| |
|
MatrixOfVectorPtr | dfdx_ |
| |
|
VarVector | vars_ |
| |
|
VectorXd | coeffs_ |
| |
|
PenaltyType | pen_type_ |
| |
|
double | epsilon_ |
| |
The documentation for this struct was generated from the following file:
 Public Member Functions inherited from sco::CostFromErrFunc
Public Member Functions inherited from sco::CostFromErrFunc 1.8.3
1.8.3

